We continue our seminars serie, on Friday, March 14th at 16.00
For this event in the Aerospace PhD Seminar Series, we had the pleasure of hosting Dr. Daniel Selva, Associate Professor of Aerospace Engineering at Texas A&M University.
The event was streamed (Online) on Friday, March 14th.

Daniel Selva is an Associate Professor of Aerospace Engineering at Texas A&M University, where he directs the Systems Engineering, Autonomy, and Knowledge (SEAK) Lab. His research interests focus on the application of artificial intelligence (knowledge representation and reasoning, planning and scheduling, multi-agent coordination), and machine learning to space system design and operations. He is particularly interested in new mission concepts that leverage autonomy and distributed architectures for Earth observation. He has also worked on virtual assistants to support users for various data-driven decision-making tasks, such as astronauts in long-duration exploration missions resolving spacecraft anomalies, or engineers making sense of Entry Descent and Landing simulations. Before doing his Ph.D. in Space Systems at MIT, Dr. Selva worked for four years in Kourou (French Guiana) as an avionics specialist within the Ariane 5 Launch team, where he had 21 successful Ariane 5 flights.
Dr. Selva has a dual background in electrical engineering and aerospace engineering, with degrees from MIT, Universitat Politecnica de Catalunya in Barcelona, Spain, and Supaero in Toulouse, France. Between 2018 and 2022, he served in the European Space Agency’s Advisory Committee for Earth Observation, which advises the Director of Earth Observation in strategic matters including but not limited to the selection of Earth Explorer missions. Dr Selva is an Associate Fellow of the American Institute of Aeronautics and Astronautics (AIAA) and received the 2023 Texas A&M Engineering Young Faculty Fellow Award and the 2025 Texas A&M Engineering Teaching Impact Award.
“Autonomous coordination of Earth observing sensor webs“
Abstract:
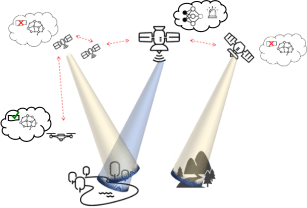
There is a need to improve our response time to disasters such as tropical storms, floods, and wildfires. Disaster response relies on combining measurements taken from sensors in space, air, or on the ground to coordinate a response. This response often includes the need for additional measurements from complementary viewpoints or with different sensor types. Better response time in Earth observing systems can also help improve our understanding of short-time-scale hydrological processes, such as floods and algal blooms. Currently, the response time of such systems is limited by the time needed to acquire the desired observations, receive them on the ground, process all the data, generate updated plans, uplink them to the sensors, and execute them. One approach to improve response time and spatio-temporal sampling of events of interest is increasing the autonomy of observing systems so that the network of sensors can self-coordinate instead of relying on plans generated by a human operator. In this talk, I will discuss our current work funded by NASA on decentralized coordination approaches for autonomous Earth observing sensor webs. We are studying the feasibility and scientific merit of mission concepts based on networks of heterogeneous sensors in air and space that can autonomously detect events of interest and react to them without need for a human in the loop to coordinate a response. The concept relies on on-board reasoning using knowledge graphs to reason about the capabilities of the sensors in the network, and decentralized coordination algorithms to allocate tasks to the most appropriate sensors. Comparing consensus-based algorithms with periodic information sharing and decentralized replanning reveals interesting trade-offs between exploration (discovering new events of interest) and exploitation (gathering additional observations of known events).

The seminar began at 16:00.
No previous registration was required.
